联系电话

天津福业动力机械科技发展有限公司
 初级会员·8年
初级会员·8年
 具体成交价以合同协议为准
具体成交价以合同协议为准
- 联系人:
- 张小姐
- 电话:
- 13132097161
- 手机:
- 13032283801
- 售后:
- 13032283801
- 传真:
- 86-022-86427998
- 地址:
- 天津市西青区新科道
扫一扫访问手机商铺

微信扫码进入微名片
产品简介
| 产地 | 进口 | 销售区域 | 全国,华东,华南,华北,华中,东北,西南,西北,港澳台,海外 |
|---|
导轨滑块KUVE45-B-SNL-W2-V1-G1/1090-20/20
产品介绍
导轨滑块KUVE45-B-SNL-W2-V1-G1/1090-20/20
天津福业动力机械科技发展有限公司
气缸是由缸筒、端盖、活塞、活塞杆和密封件等组成,其内部结构如图《SMC气缸原理图》所示:
1)缸筒
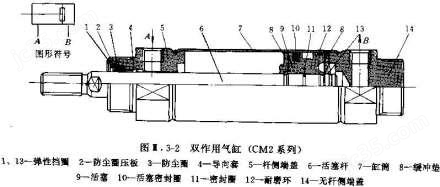
缸筒的内径大小代表了气缸输出力的大小。活塞要在缸筒内做平稳的往复滑动,缸筒内表面的表面粗糙度应达到Ra0.8μm。
SMC、 CM2气缸活塞上采用组合密封圈实现双向密封,活塞与活塞杆用压铆链接,不用螺母。
2)端盖
端盖上设有进排气通口,有的还在端盖内设有缓冲机构。杆侧端盖上设有密封圈和防尘圈,以防止从活塞杆处向外漏气和防止外部灰尘混入缸内。杆侧端盖上设有导向套,以提高气缸的导向精度,承受活塞杆上少量的横向负载,减小活塞杆伸出时的下弯量,延长气缸使用寿命。导向套通常使用烧结含油合金、前倾铜铸件。端盖过去常用可锻铸铁,为减轻重量并防锈,常使用铝合金压铸,微型缸有使用黄铜材料的。
导轨滑块KUVE45-B-SNL-W2-V1-G1/1090-20/20
工作范围是指机器人操作臂末端或手腕中心所能到达的所有点的集合,也叫做工作区域。因为末端执行器的形状和尺寸是多种多样的,为了真实反映机器人的特征参数,所以是指不安装末端执行器时的工作区域。工作范围的形状和大小是十分重要的。机器人在执行某一作业时,可能会因为存在手部不能到达的作业死区(dead zone)而不能完成任务。
机器人操作臂的工作范围根据工艺要求和操作运动的轨迹来确定。一个操作运动的轨迹往往是几个动作合成的,在确定工作范围时,可将运动轨迹分解成单个动作,由单个动作的行程确定机器人操作臂的最大行程。为便于调整,可适当加大行程数值。各个动作的最大行程确定之后,机器人操作臂的工作范围也就定下来了




